如何测绘世界
特征点是图像中一个明显的、高对比度的视觉特征。墙上海报的一角,木地板上的纹理或建筑物外墙的一个细节。
地图构建的工作原理是在不同视角的多张图像中找到相同的特征点,并通过三角测量这些特征点来估计场景的三维结构。
该应用程序需要一个许可证。你可以通过发送电子邮件给我们(info@phantomsxr.com)来申请免费的商业许可。电子邮件的内容格式如下。
- 主题。[请求] XRMOD WorldMapper许可证
- 内容。申请人的公司或个人名称,以及要使用的行业部门。
重要的是要尝试从多个视角覆盖目标环境,如果有必要的话,可能还有不同的距离。
你应该争取在你想要匹配的图像之间有多达50%的重叠。 为了获得最佳效果,同一特征点应至少在3个不同的图像中进行匹配。
绘图时,我们的绘图应用程序会通知你,如果后续的图像可以通过匹配的**特征点进行连接。
下面是9幅捕获的图像以及它们如何相互连接的图示。

请记住,并不是所有的连续图像都需要连接起来!
上述图像是按顺序拍摄的,而图像3和4并没有相互连接。这并不重要,例如,在构建地图时,图像3将与1、2和9连接。
空间要求
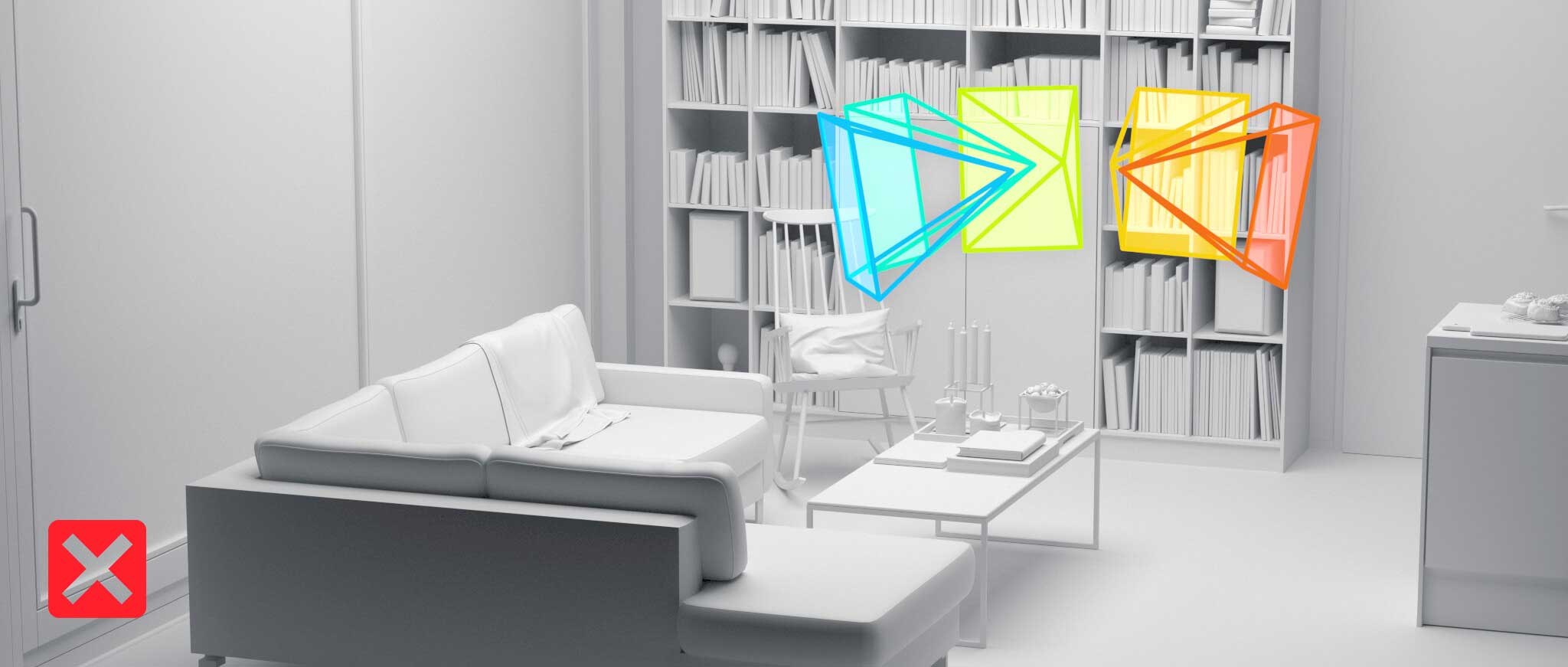
不是所有的空间都可以被映射。
例如,高度反射的表面没有静态的视觉特征来构建地图。
另一个问题是具有统一颜色的大面积区域,完全没有可探测的视觉特征。
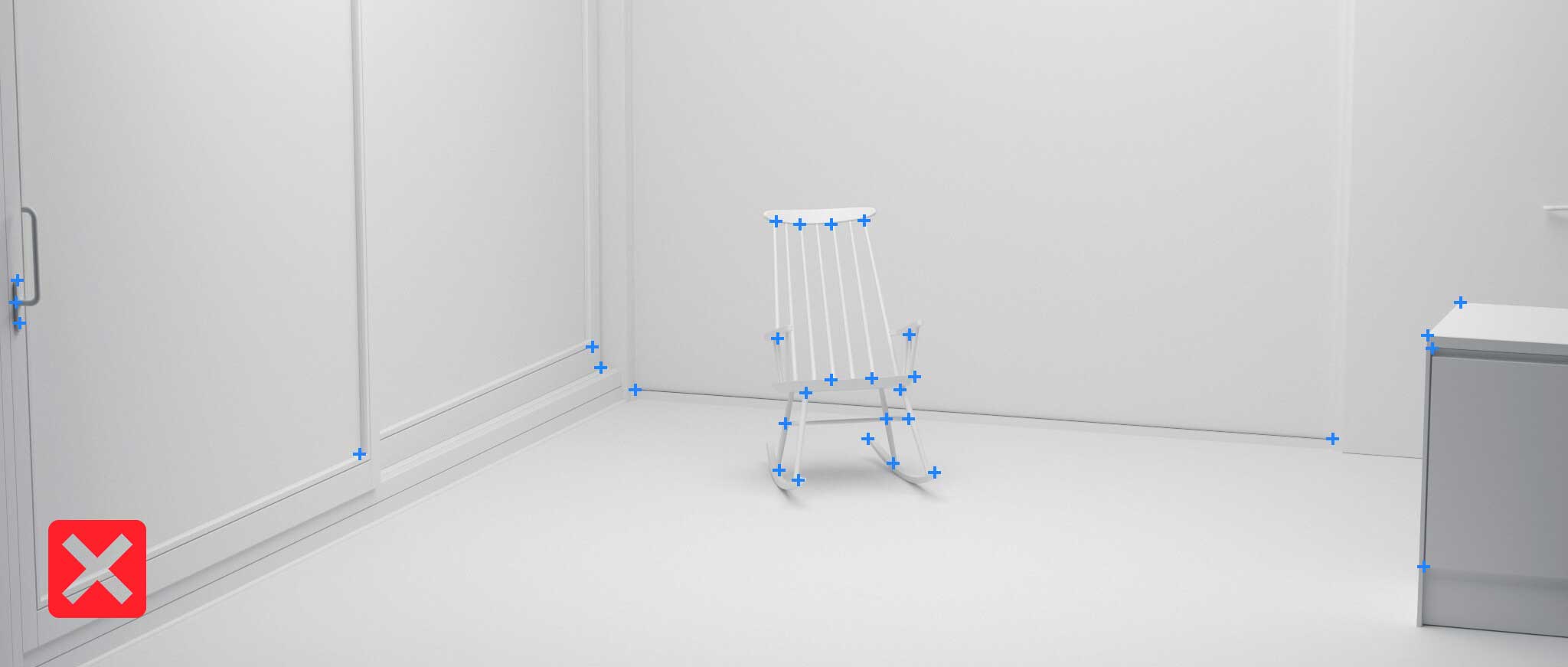
没有足够的视觉特征,而且大部分都在一个可能会移动的物体上。
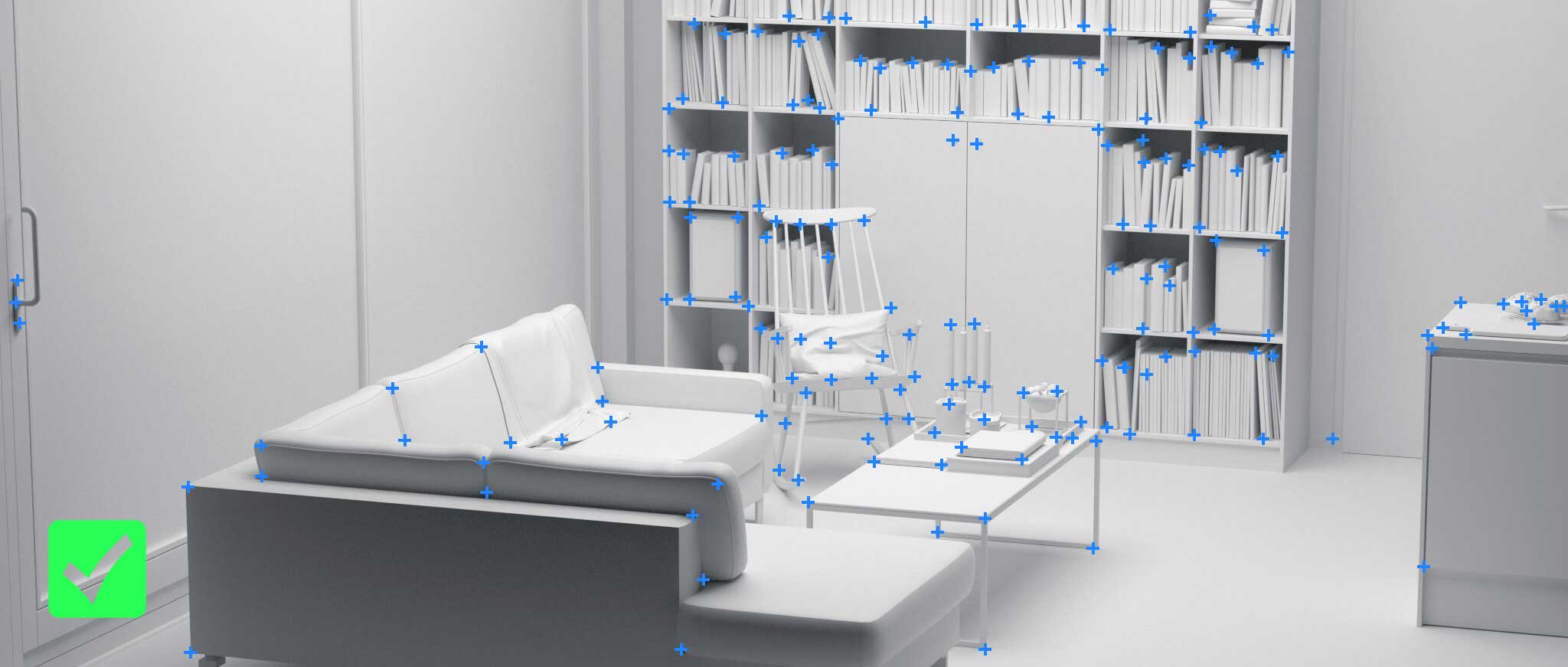
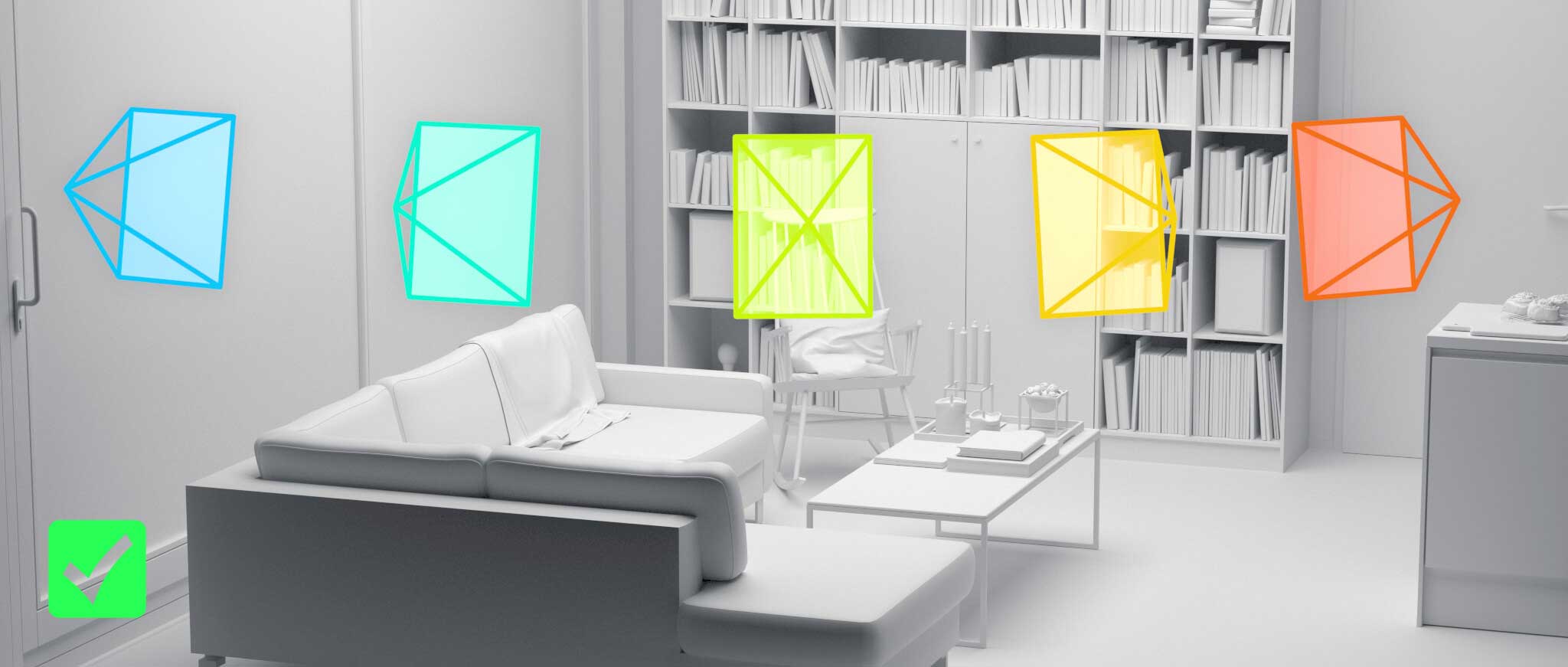
大量的视觉特征。其中一些是在移动的物体上,但还有许多是在静态的表面上。这种场景可以很容易地被映射。
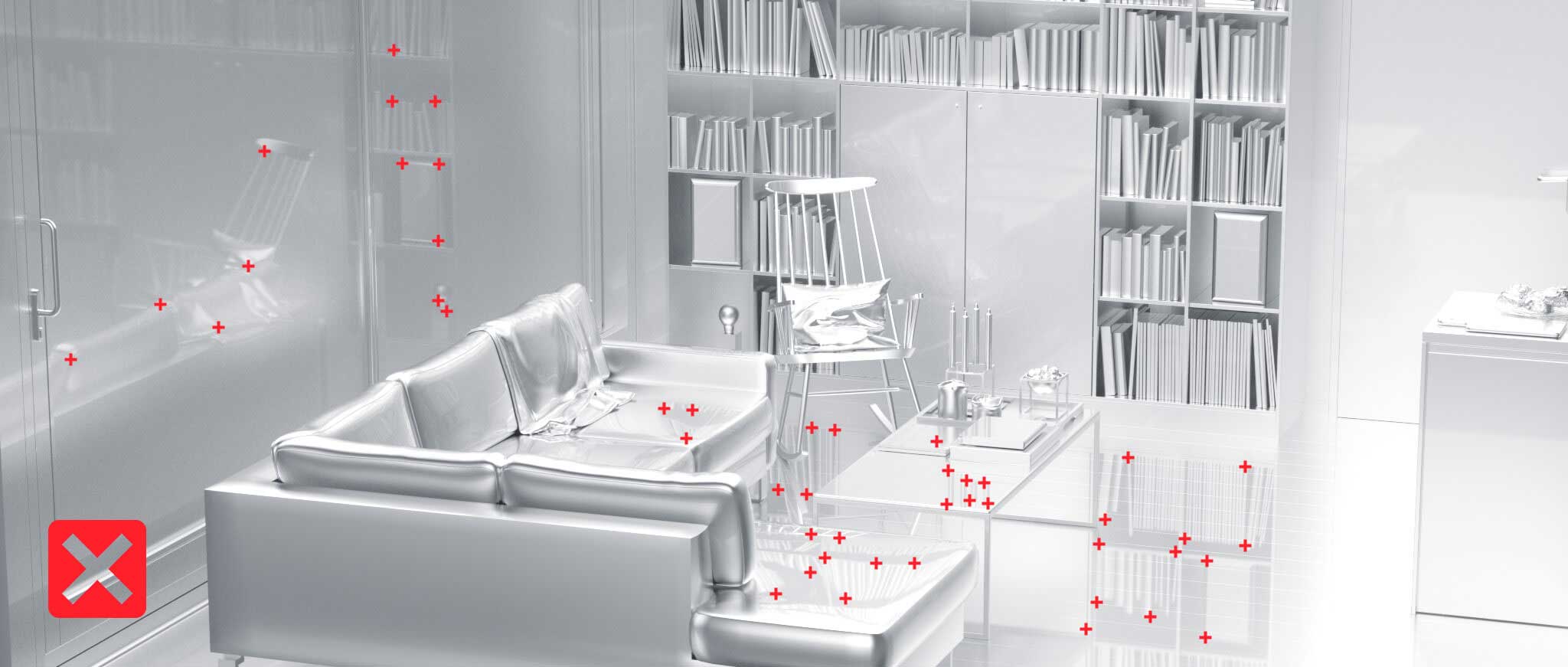
反射的表面会使相机看到错误的视觉特征。这些反射的特征会根据视角的不同而在视觉上移动,不能用于建造。

低光照场景将很难被摄像机看到。任何视觉特征都可能是模糊的、嘈杂的,即使被检测到也会造成问题。
绘图说明
为了构建一个好的地图,捕获的图像需要从不同角度覆盖相同的区域。
当对照地图进行定位时,地图应该包含来自具有类似视角的捕获图像的数据。
捕获的图像不需要完全相同,但应该有一个大致相似的角度和与目标的距离。
一个特征点出现在越多的图像中,其准确性就越高。系统要求一个特征点在两张图片中被发现,但越多越好。

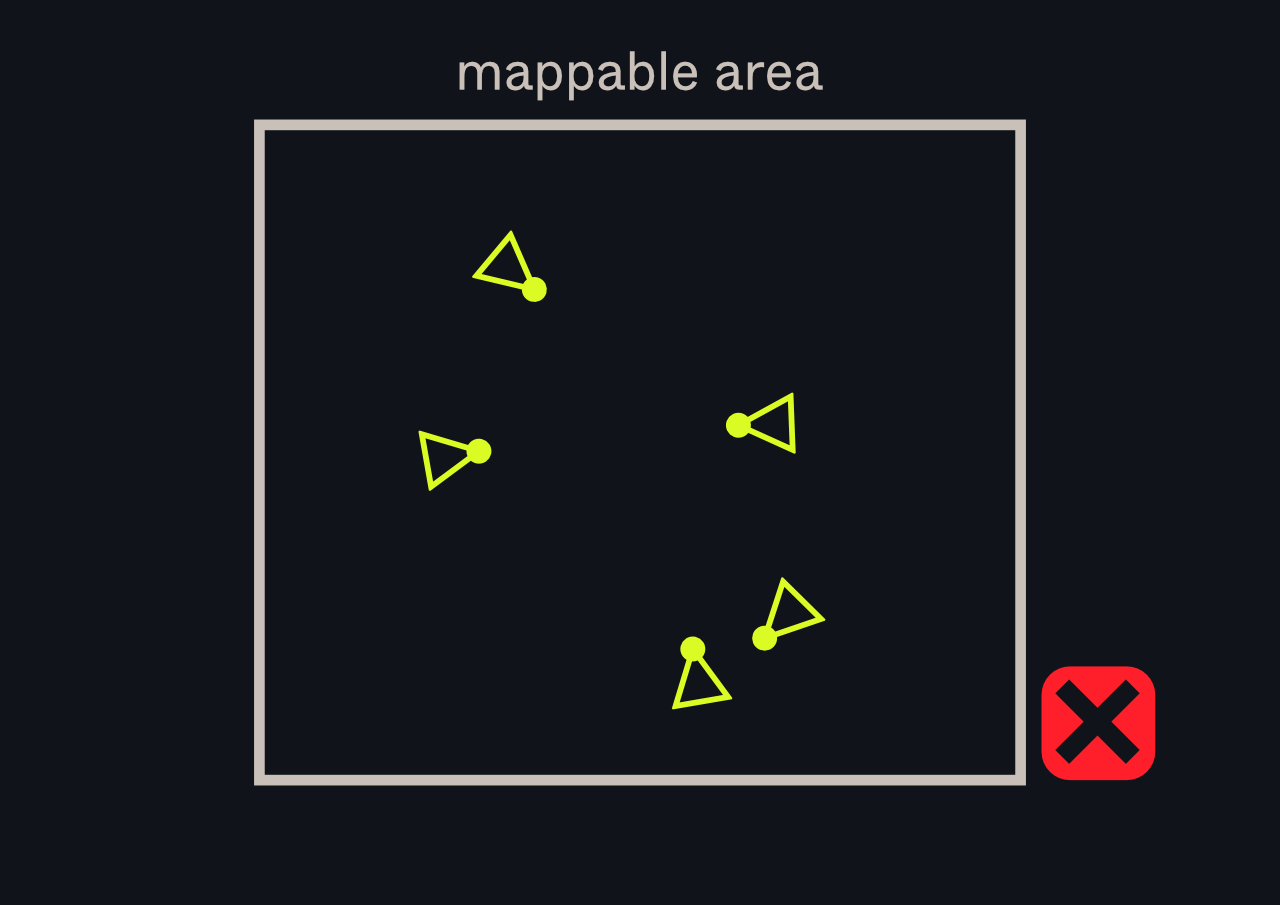
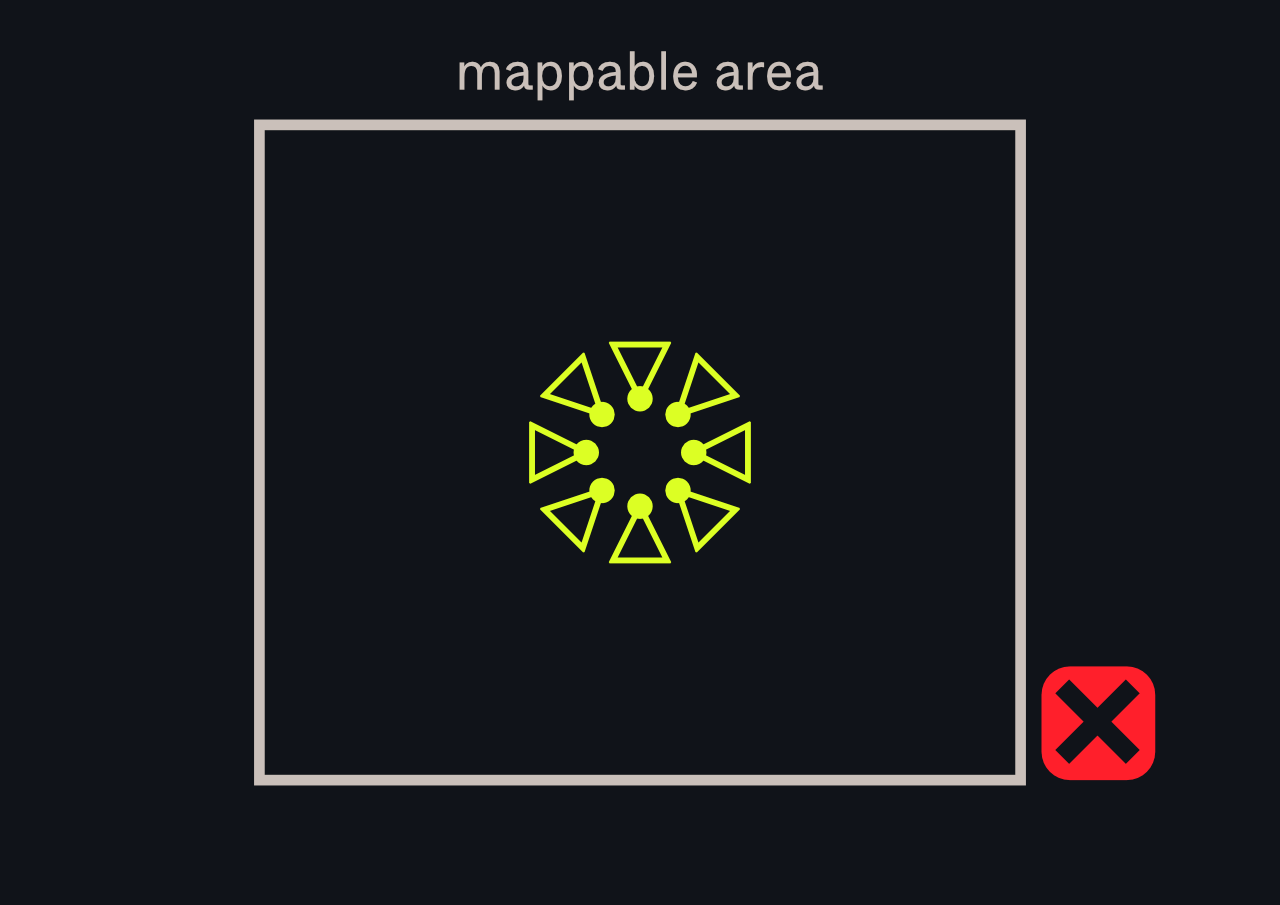
No overlap between captured images as all the images are viewing different directions. Matching features can't be found between them and the images will not connect.
各组图像之间没有视差,所有的图像都是从一个视点拍摄的。 匹配的特征点被找到了,但是所得到的地图要么是失败的,要么是不准确的,因为捕获的图像之间没有距离。 为了获得更好的结果,如果你已经有了一些制图的经验,可以在更远的地方捕捉图像,或者捕捉许多 "全景图"。
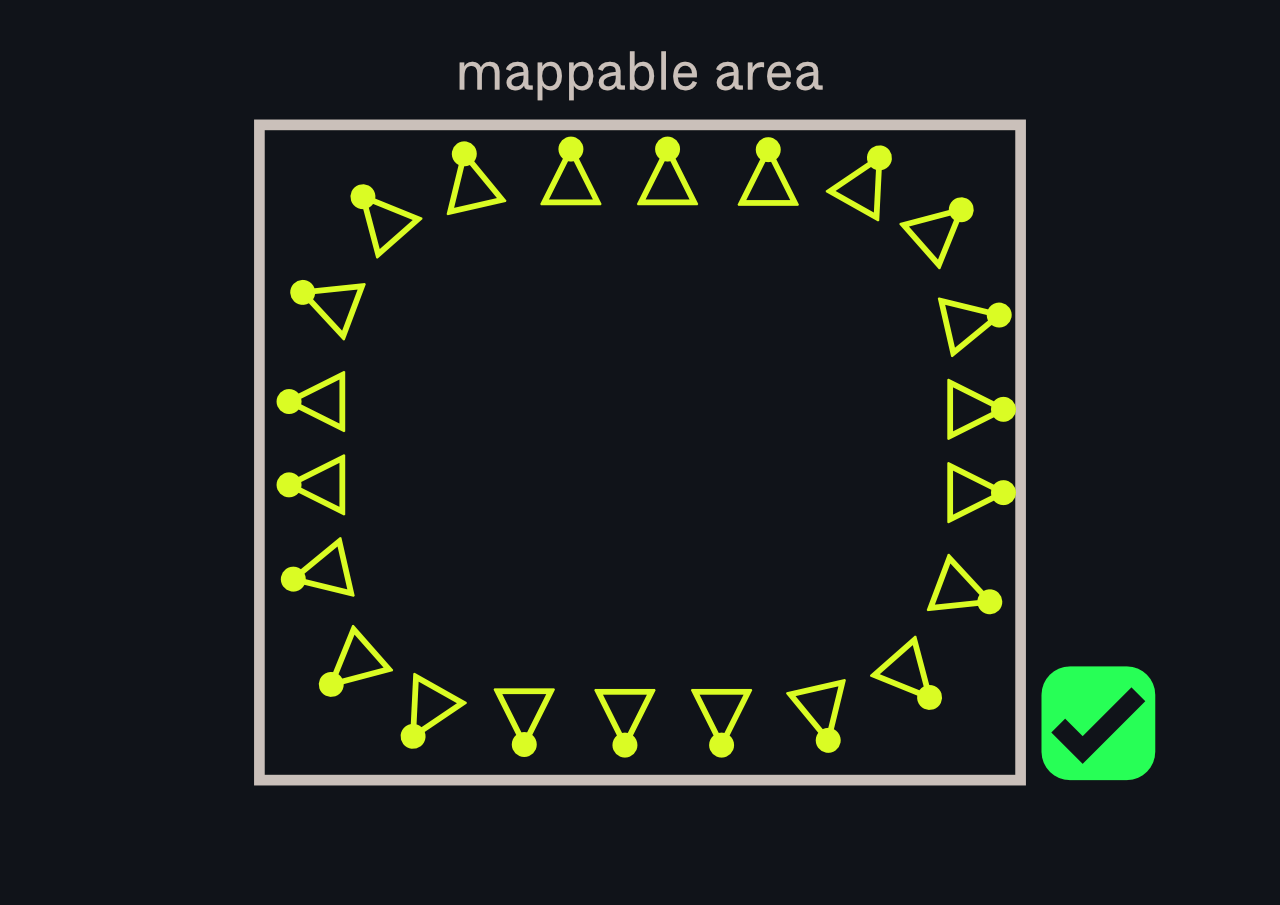
捕捉到的成像之间的特征点有很好的重叠,它们之间有很多视差。由此产生的地图将是非常准确的。


这张图片说明了连续拍摄的图像之间的重叠特征点。 为了在图像之间建立良好的联系,你应该争取让图像在三分之一到一半的图像区域内重叠。这可以确保在不同的图像之间找到足够多的相同特征。
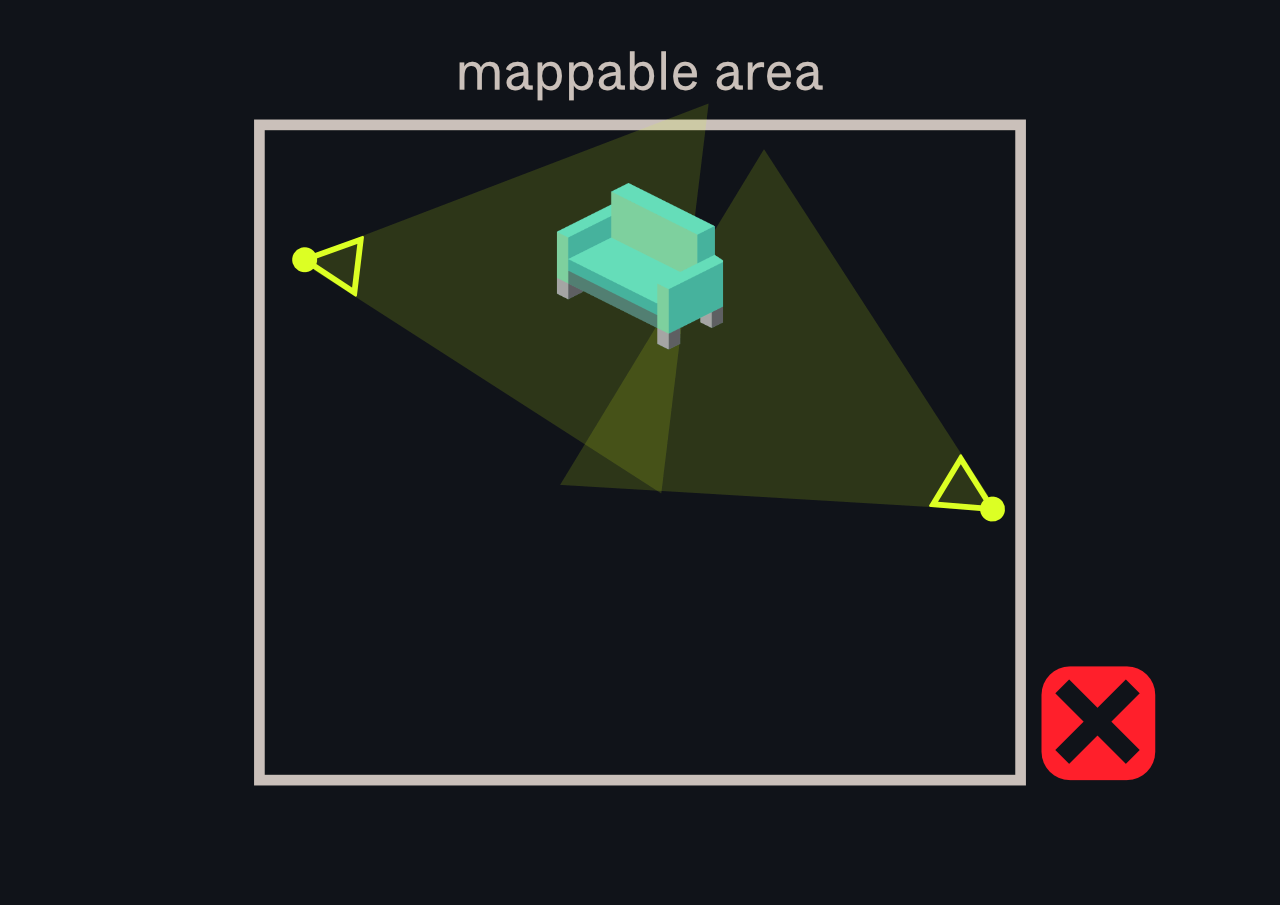
为了确保一个地区或一个物体被纳入地图,你需要对该物体至少有3个不同但相似的观点。
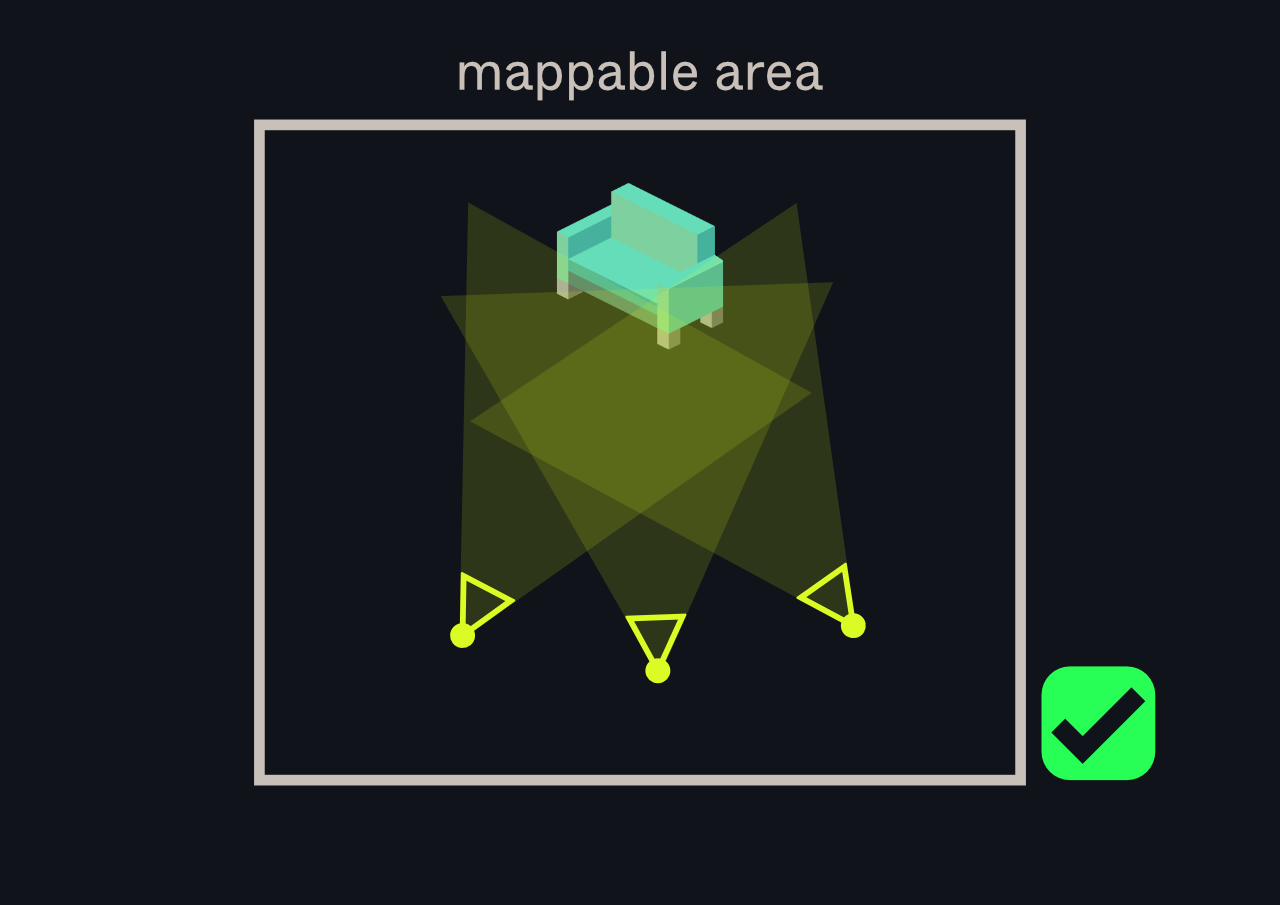
至少有3个不同但足够相似的视角来观察物体及其视觉特征。
至少有3个不同但足够相似的视角来观察物体及其视觉特征。
Examples
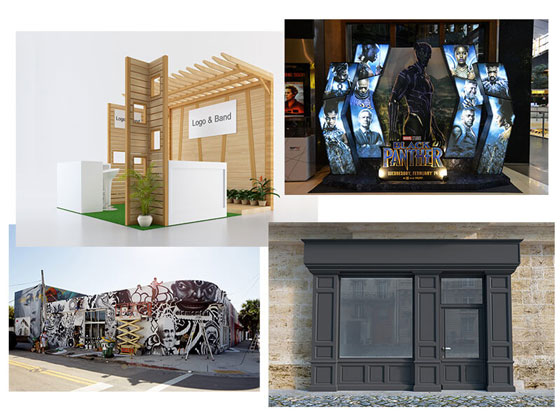
"AR Hotspot"
小到中等的特定地点,在观看时,会有增强现实的内容。
这些地点不需要映射用户周围的一切,只需要映射出感兴趣的点。
热点的例子是雕像、壁画和其他街头艺术。还有店面、弹出式商店和展览服装以及电影营销活动的装置。
在绘制此类热点地图时,尽量从尽可能多的角度覆盖更多的区域。拍摄一系列相互重合的图片。如果你需要用额外的细节来覆盖热点的某个特定部分,你可以对该区域进行特写。
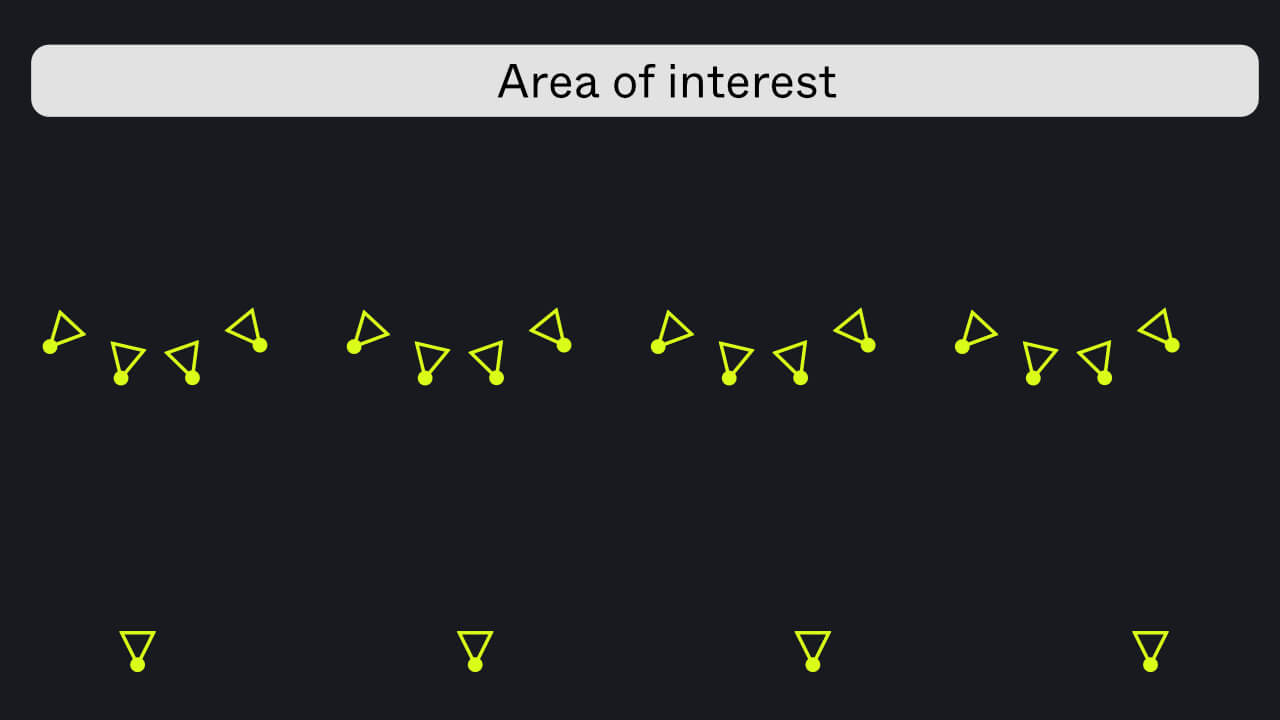
如果你需要绘制一个非常长的区域,难以用一个弧线覆盖,你可以尝试用多个 "迷你弧线 "覆盖,如下图所示。
你还可以从更远的地方拍摄更多的图像。这些将有助于我们的SDK从更远的地方对场景进行定位,也有助于将所有的东西连接在一起。

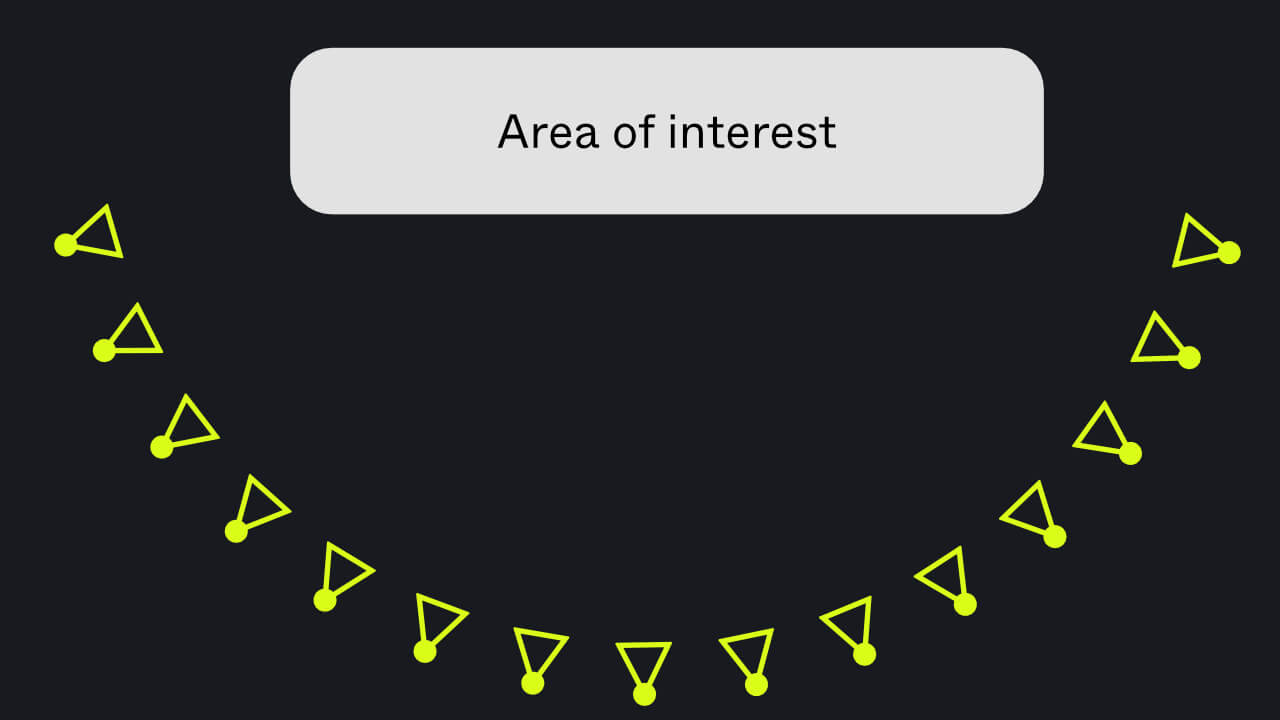
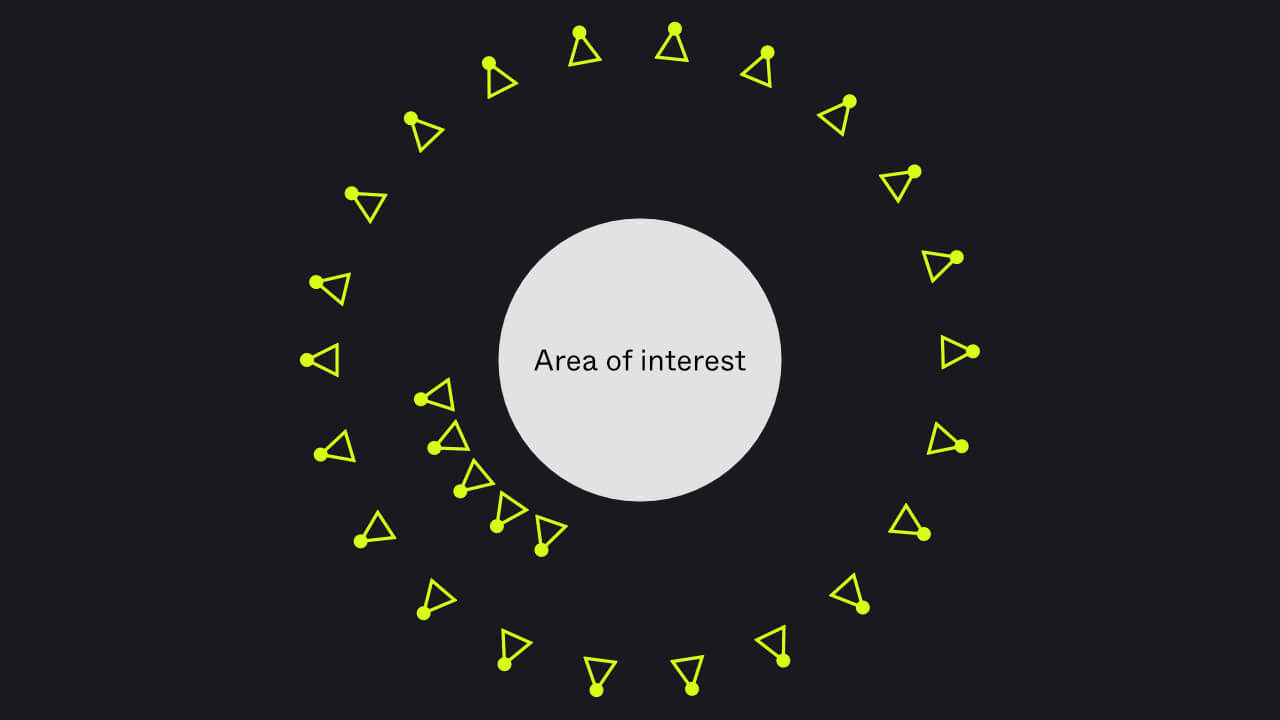
像雕像这样的地标性建筑是一个很好的例子,它的热点位置可以从四周进行测绘。要绘制这样的雕像,只需在它周围一整圈拍摄一系列的图像。
尽量将所有重要的视觉特征纳入图像中。你可以在横向或纵向模式下绘图。如果你想用特写镜头覆盖某些部分,你也可以混合方向。
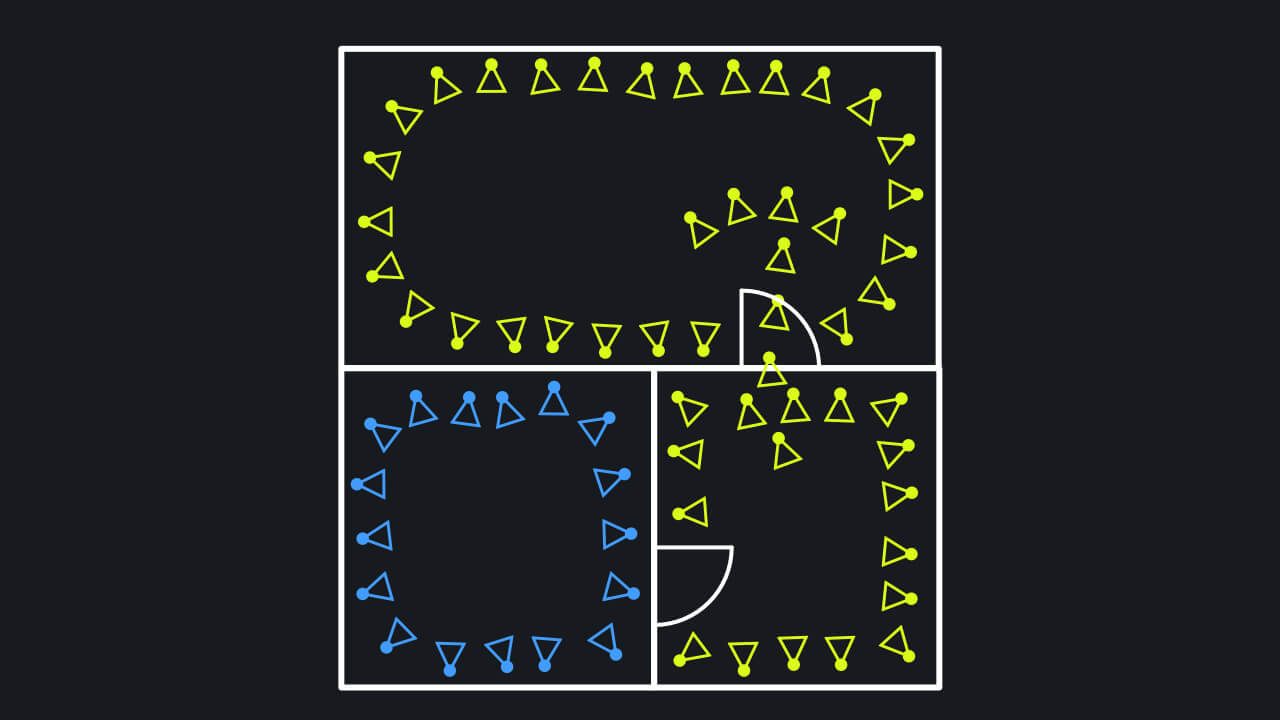
Indoor spaces
大的室内空间可以划分为每个区域或房间的独立地图。这使得更新任何可能随时间变化的区域变得很容易。这也使绘制单个部分的地图更加容易。
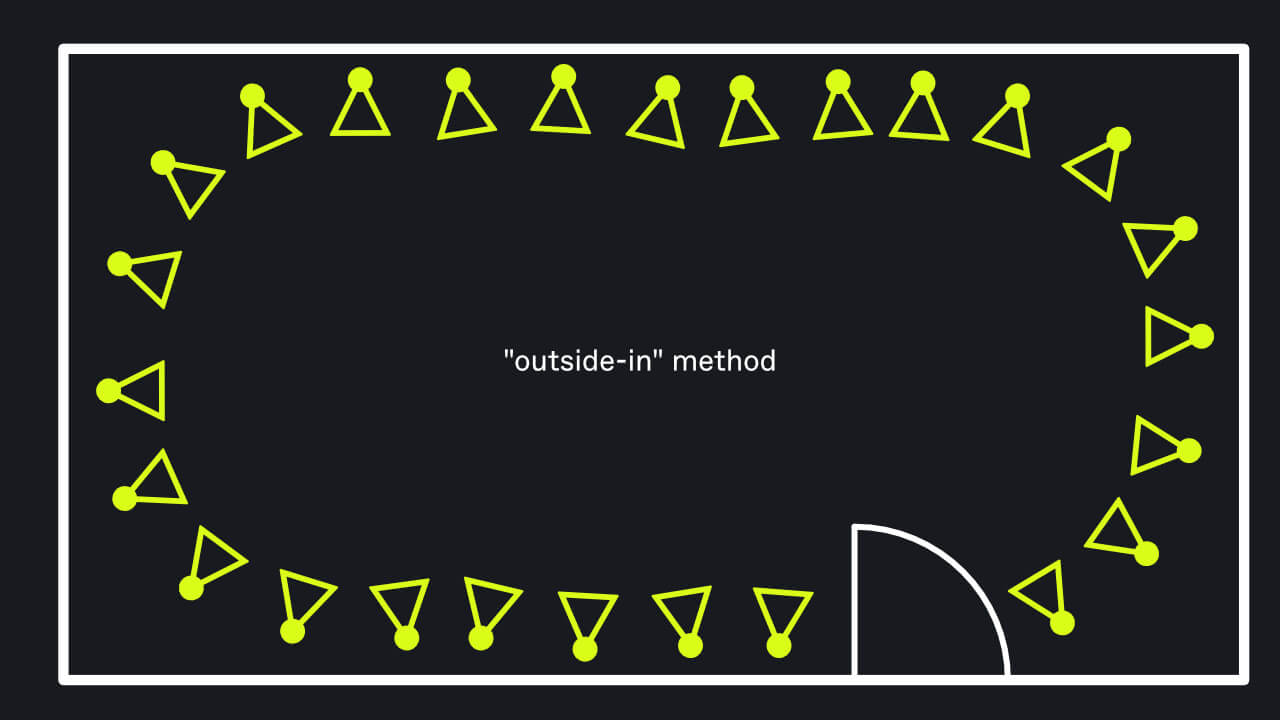
要绘制一个房间的地图,可以使用 "由外而内 "的方法。在房间周围移动时,拍摄一系列的图像,看整个空间的情况。
记住,你可以使用横向或纵向模式。在较小的房间里,横向模式通常效果很好。
只需尝试从尽可能多的角度覆盖整个区域。

你可以在Unity中用我们的多地图功能将多个地图对齐。 并非所有的区域都需要在一张地图上连接。
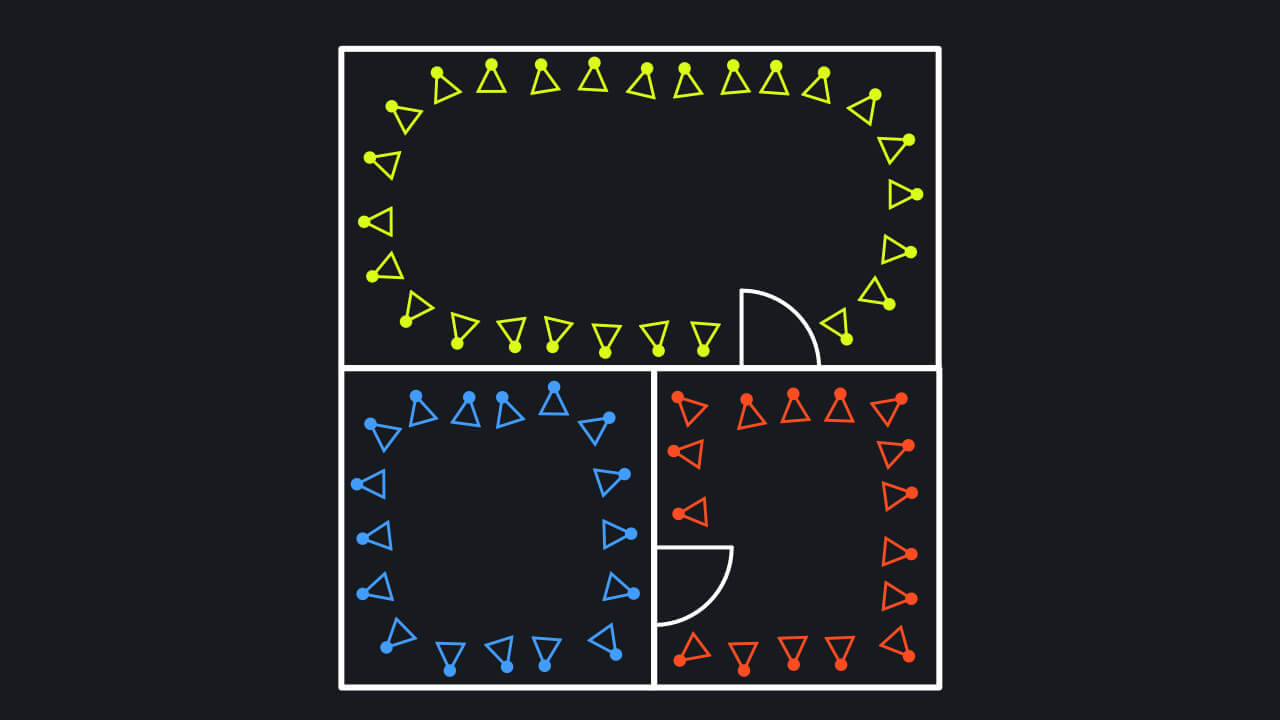
如果你想在一张地图上把许多独立的区域连接在一起,你需要确保这些区域能够在视觉上连接起来。一种方法是创建一条从一个空间到另一个空间的 "图像路径"。
如果你要绘制一个小公寓或一个购物中心的地图,这并不重要。绘图技术与空间的比例是一致的。
锚定图像
默认情况下,构建的地图是没有特定方向的
地图的Y轴可能正确地指向上方,但围绕Y轴的旋转不受约束,如果你重新映射同一空间,在不同的结构之间会有变化。
仅仅使用GPS或设备的罗盘来确定地图的方向是不够可靠的。
这使得维护AR内容变得很困难,所以我们提供了一种准确定义地图方向的方法。 通过锚定图像,你可以确保在重新映射一个空间时保留地图的方向。
在构建地图时,只使用最新的锚定图像。
使用锚定图像
当使用映射应用程序时,在工作区模式下打开工具菜单,点击添加锚点图像。
当锚定图像被捕获时,应出现一个通知。
当添加锚定图像时,图像被捕获,设备方向被记录。 记录的方向会在构建地图时使用。
捕捉锚点图像时,设备摄像头的方向被用来确定地图的Z轴。 地图Y轴是根据设备传感器和 "向上"方向自动计算的。